近日,我校青年“珠江学者”董任峰联合周小松教授以“Functional-Coupling Biohybrid Microrobots for Autonomous Cross-Domain Task Flow”为题,在国际权威期刊《Advanced Functional Materials》(IF=19.4,一区top)在线发表。该团队以小球藻为生物模板,成功开发出一种“功能耦合”型生物混合磁驱微型机器人,首次实现了跨领域任务的自主连续执行,为微纳机器人长期存在的不能连续执行不同任务的问题提供了全新的思路。本研究工作得到了国家自然科学基金、广东省基础与应用基础研究基金等项目资助。
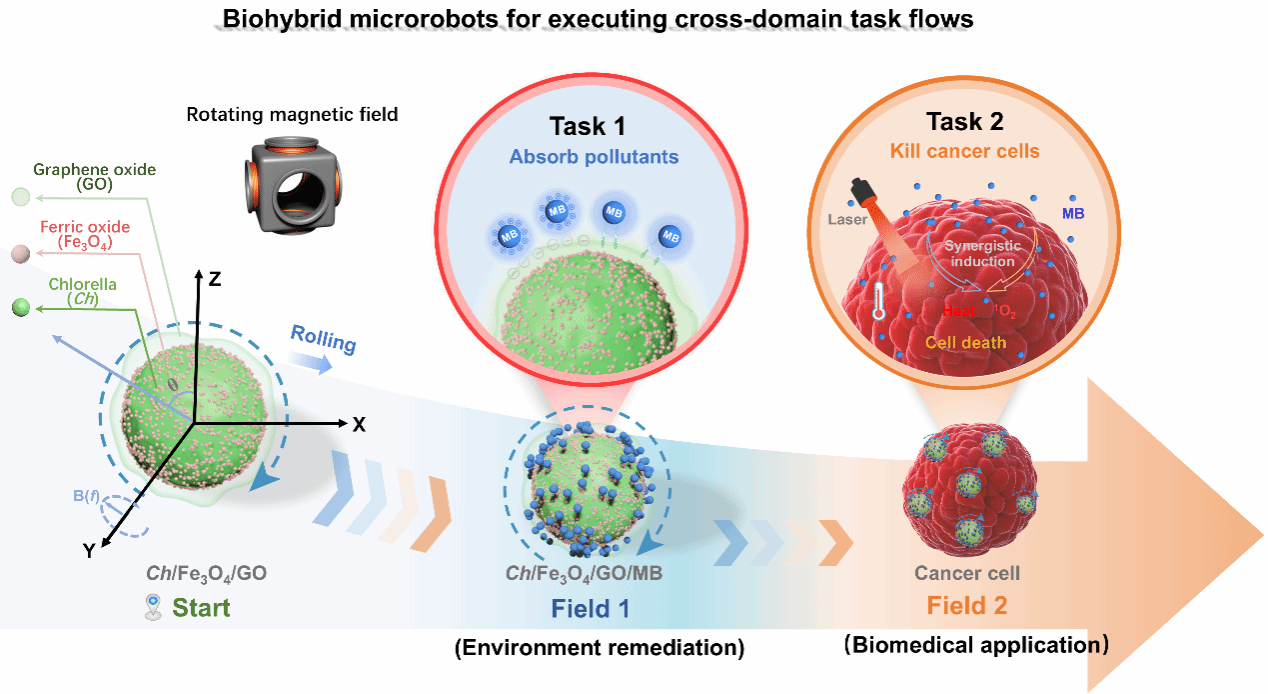
传统多功能微纳机器人虽集成了多种功能,但各功能之间往往相互独立,完成一项任务后,因物理或化学状态改变而无法继续投入下一场景。本研究的核心创新在于提出并实现了“功能耦合”策略:将前一任务的“产物”直接作为下一任务的“触发器”,使任务完成本身成为后续任务的启动信号。具体而言,机器人表面负载的氧化石墨烯(GO)在环境修复任务中高效吸附亚甲基蓝污染物(去除率>81%,吸附容量22.48 mg/g);吸附完成后,这些污染物分子原位转化为光敏剂,无需任何中间处理,即可在磁场引导下进入下一个生物医学任务,协同光热效应实现对MCF-7乳腺癌细胞的高效杀伤(细胞存活率24.4%)。这一设计将原本孤立的两项任务通过功能界面的自主切换无缝衔接,彻底消除了传统多功能机器人对中间回收、重新定向或化学激活的依赖,为构建高效、集成、可持续的跨域智能微系统提供了全新范式。
该研究论文是“华师-岭师”第三轮结对帮扶以来的又一重要科研论文合作成果。该成果不仅体现了两校在科研合作上的进一步深化,更是帮扶工作有序推进的成效体现,帮扶的系列成果为我校化学学科、广东省“冲补强”重点学科建设以及学校的高质量发展提供了有力支撑。